
 图片来源:Unsplash
图片来源:Unsplash
左脚踩右脚如何上天?也许你大力将一只脚踩断,让这只脚以超快(最好能到光速)的速度向下飞出去,就能向上飞一小段距离(毕竟整个身体要比一只脚重得多)。好消息是,科学家推导出一种可能,不必用如此可怕的方式,伸展收缩身体也许就能提供动力。
撰文 | 不周
审校 | 二七、王昱
在关于宇宙探索的电影中,有时会出现一种噩梦般的场景——宇航员漂浮在太空中,在没有物品可以抛掷的情况下,无论怎样挥动四肢,都无法朝着空间站前进哪怕一点点,这段距离看起来近在咫尺,却又遥不可及。这是物理规律决定的现实,在没有外力参与的条件下,在静止的初始状态下,无论你如何折腾,都只会停留在原地。最多是随着四肢扭动,躯干有些转动,一旦你恢复到初始姿势,一切挣扎都是徒劳。

图片来源:Unsplash
回到令人安心的地球,与太空中绝望挣扎相似的是,我们仍需要改变身体的形态来移动。毕竟,直愣愣地杵着,脚下没有电梯、车辆这些动力源,我们当然只能留在原地。显然,不管在何处,无论是翱翔天际的飞鸟,还是穿梭水中的游鱼,或是蜿蜒爬行的蛇虫,也包括我们人类,都要通过身体的形变,将体内的生物能转化为机械能,才能移动起来。
但如果移开飞鸟翅膀边的空气、游鱼身侧的水、或是我们脚下粗糙的地面,那么身体不管怎样形变,都无法利用环境提供的反作用力前进。太空的特殊之处就在于此——真空,我们无法与环境交换动量,也就无法改变位置,这看起来是个盖棺定论的事实。
然而,2003年,美国麻省理工学院(MIT)的天文学家杰克·威兹德姆(Jack Wisdom)在《科学》()上发表了一篇文章表示,这个推论存在漏洞:如果宇航员所处的时空是弯曲的,那么物体形状和位置的变换很可能不再遵循基本的动量守恒定律。也就是说,在弯曲空间里,宇航员以特定方式挥动他的四肢,就能在真空中“游动”起来。
弯曲时空与几何相位
时空可以是弯曲的,这就相当于,物体下落时不会直着下坠,而是凭空走了个弧线掉落在地,甚至根本不会坠落,反而拐了个弯飞向远方。对于习惯地球重力的我们而言,这多少有些不可思议。
那么弯曲的时空是怎样出现的呢?根据爱因斯坦一个多世纪前提出的广义相对论,我们知道:有质量的物质会引起时空的扭曲,而扭曲的时空又会指导物质的运动。
我们很难想象结合时间维度的高维空间如何描绘,但可以将时空想象成一张具有弹性的巨大薄膜。大质量的物体,如恒星,像铅球一般放在时空薄膜上,会引起薄膜的凹陷,也就是时空的扭曲。而行星质量相对较小,就会像弹珠一样在薄膜凹陷处做向心运动。
很明显,明显弯曲的时空通常出现在大质量的天体附近,比如恒星、黑洞。但实际上,时空曲率无处不在,我们感受到的地心引力,也是由地球质量压凹时空薄膜导致。只是从宇宙尺度上看,我们生活的空间曲率几近于零,可以看作平直空间。
根据广义相对论,空间曲率会影响物质的运动。身为平直空间中的生物,我们很容易想象二维平面上的运动。如上图,我们平举右手,从一个点出发,不改变身体的朝向,在平面上完成一个闭合的路径,回到起点。同时一路记下我们右手指向的方向,你会发现,起始与结束时记录的方向没有改变,这符合常识。
但倘若平面变为球面,经过相同的闭合路径,右手指向的方向就会发生改变。这个角度的变化(相位),并非身体主动转动导致,完全是由运动路径所处空间的几何性质决定,因此也称之为几何相位(geometric phase)。
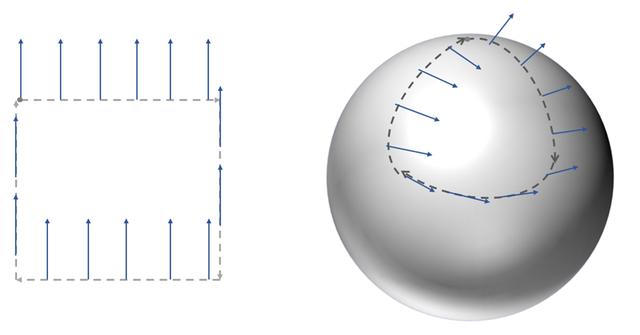
图片来源:不周
所以,即使我们无法纵观空间的曲率,通过这样的方法,也能够判断所处空间的曲率是否为零。而弯曲空间独特的几何特性,就使得一些不允许在平直空间发生的物理现象出现,比如在没有外力驱动的条件下,通过周期性几何形变在弯曲空间中“游动”。
实验室中的“弯曲”空间
理论上虽能推导出“太空游泳”指南,但如何在实验上验证这一奇异现象成为了巨大的挑战。显然,人类目前还无法在黑洞附近进行实验。
近期在《美国科学院院刊》上发表的一项研究中,美国佐治亚理工学院(Georgia Institute of Technology)与其他高校合作的研究团队,在实验室中构建了弯曲时空的模型。你可能会很好奇,人类如何能在实验室中“弯曲”时空?
事实上,弯曲空间中的奇特运动不仅会发生在被物质扭曲的空间中,还可以等效为物体在曲面上的运动。由此,研究团队巧妙地搭建了一个能改变自身形状的机器人——“游泳者”,它可以在弯曲表面上自由移动。
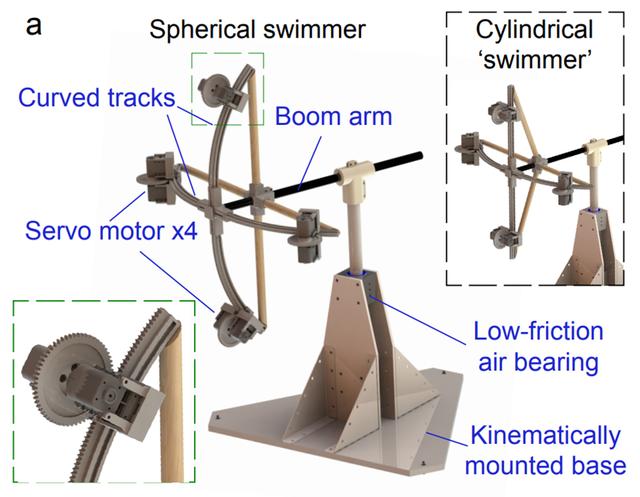
球面“游泳者”与柱面“游泳者”:由可调底座、空气轴承、动力臂、弯曲轨道和四个伺服电机配重构成。(图片来源:原论文)
如上图所示,“游泳者”机器人的骨架是两个垂直交叉的弯曲轨道,四个能精确控制速度和位置的电机可在轨道上自如移动。整个机器人通过一根空气轴承与固定的底座相连,由于空气轴承的摩擦系数极低,理论上“游泳者”在变换电机位置的过程中,就能主动绕着空气轴承在水平面上发生转动。调整交叉轨道的曲率以及机器人绕轴承转动的半径,就相当于调节了“游泳者”所处的空间曲率。上图中,研究人员正是通过调节垂直方向的轨道曲率,搭建出了两位勇士——球面“游泳者”与柱面“游泳者”(上图右上的虚线框中)。
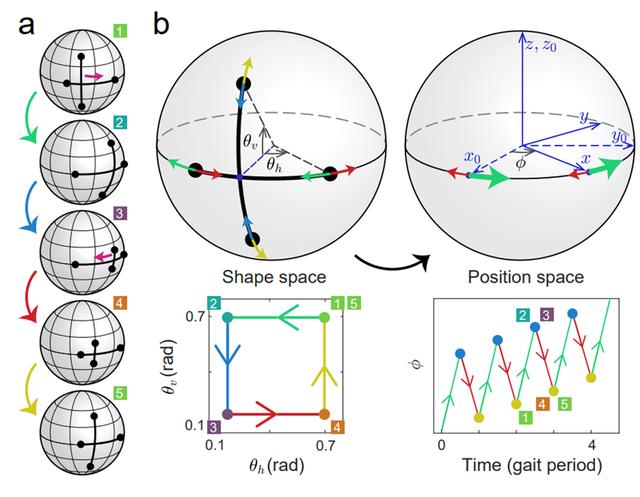
“游泳者”需要按照上图a周期性变换形状。图b显示了机器人形状变换的定义:电机配重与球心的夹角组合变换;以及机器人运动位移的定义:整体偏离初始位置的角度。(图片来源:原论文)
违反直觉的“游泳者”
根据理论推导,球面“游泳者”的四个电机配重需要按照上图a的顺序循环变化位置。由于转动限制在水平面上,可以最大程度地减少摩擦力与重力对运动过程的影响。而调节重物的位置,其实对于整个机器人而言,就相当于变换形状。观察图a1到图a5的变化,很明显,球面“游泳者”经过一个形状变换周期,成功地推动自身在水平面上绕轴挪动了一小步。
而实验也给出了基本一致的结果。“理论预测的现象发生了,它是如此的违反直觉:随着机器人改变自身形状,它会以与环境相互作用无关的方式,主动在球面上运动。” 这项研究的负责人,佐治亚理工学院的物理学家泽布·洛克林(Zeb Rocklin)说道。
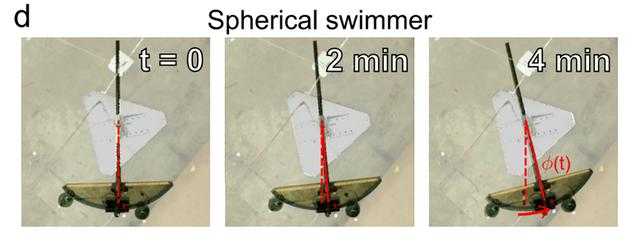
没有外力参与的情况下,“游泳者”仅靠自身的形变,在4分钟内绕轴转动了肉眼可见的角度。(图片来源:原论文)
乍看之下,这的确让人不解。但这就好像在停车位里调整车辆位置,我们重复数次驶出、转向、倒回的循环,就能实现微小的侧向平移。停车过程中,我们会驶出一段距离,最终还会返回;我们会改变方向,最终也会恢复;而我们改变的侧向位置,却是无法回到初始的变化。弯曲空间的形变运动也是一样,周期性变换中看似所有参数在循环中都保持不变,但这其中存在一个变量——几何相位,它会在周期运动中累积,表现为空间上的位移。
有趣的是,研究人员发现,虽然水平方向上不存在外力驱动,但是形变引发的转动位移会导致轴承上微小的摩擦力累积起来,为机器人积攒反向动量。在停止周期性形变后,机器人会在反向动量的作用下转回初始位置。
不过太空中的宇航员倒不必担心这个问题(没有摩擦),发现身处弯曲空间后,他们首先最需要的是,找到适合自己身体的周期性“变形”方案。很遗憾,由于人类身体质量的分布相对均匀,并不像“游泳者”模型,在四肢末梢拥有配重块,这意味着我们通过伸展、收缩四肢调节转动惯量的效率会很低。
显然,人类注定无法成为太空中的“游泳健将”。但好消息是,曲率更大的弯曲空间可以帮助我们提升效率,前提是身处其中的人类能承受更强的扭曲拉伸感。没错,在弯曲的空间里,我们需要克服的不再是重力,而是努力“掰弯”我们身体、使头和脚沿不同方向运动的力。
论文链接:
https://www.pnas.org/doi/10.1073/pnas.2200924119
参考链接:
https://www.sciencealert.com/robot-shows-its-possible-to-swim-through-the-emptiness-of-a-curved-universe
''Swimming in Spacetime: Motion in Space by Cyclic Changes in Body Shape''
https://mp.weixin.qq.com/s/SrQ8d6pP6jik7ZzdF0yRPA
转载内容仅代表作者观点
不代表中科院物理所立场
如需转载请联系原公众号
来源:环球科学
编辑:just_iu
生意营销3大宝:彩铃、定位、认证,一个也不能少,如有需要,添加 微信:xnc528 备注:3
如若转载,请注明出处:https://www.clzz8.com/14829.html
相关推荐
-
养肺先学会呼吸,三招“吐呐”姿势,助你养出好肺
生活中你有没有发现很多人都是爬楼爬了两三层就已经气喘吁吁;还有的人刚刚入冬,吸一点凉气就感冒,动不动就咳嗽;还有的稍微出外遇到点雾气,咽喉部就开始难受,这些人,究其原因都是肺功能不…
-
男人作起来,有多狠?男人发起情是什么样子!
常听老辈说,人就怕作! 男人长的一表人才,很斯文,又当过兵,身上有一种特殊的气质。他老婆是父母包办的,当兵期间接的婚。等复原回家后,两个儿子已经上小学了,自己是干部,老婆没文化,说…
-
7一12岁儿童必看励志电影7一12岁儿童必看励志电影中国!
1、《奇幻森林》 能把一经典童话讲的如此深刻,适合所有在水泥丛林中缺乏身份认同的我们。 也许,你总觉得自己是异类,你总觉得自己和环境格格不入,你抗拒狼群的规则却又不得不遵守,你排斥…
-
胎儿过大、脐带绕颈,还能不能顺产?医生日常监测可避险
(声明:本文仅用于科普用途,为了保护患者隐私,以下内容里的相关信息已进行处理) 【基本信息】女,28岁 【疾病类型】脐带绕颈 【治疗医院】重庆医科大学附属第一医院 【治疗方案】孕妇…
-
从_AlphaGo_到_GPT,注定坎坷的通用人工智能之路
学会使用一个正在快速进化的黑箱工具,是人类以前没遇到过的课题。 文丨龙志勇 程曼祺编辑丨程曼祺 75 岁的图灵奖获得者杰弗里·辛顿(Geoffrey Hinton) 大半辈子都在研…
-
ChatGPT_API余额批量查询代码
直接上代码,需要自行搭建反向代理,用宝塔搭建就行,很简单,以下是ChatGPT API余额批量查询代码! <!DOCTYPE html> <html> &l…
-
情侣间不可忽视的恋爱小技巧。,谈恋爱的技巧和方法
恋爱是人生中非常重要的经历之一,但是恋爱也是一门艺术,需要一些技巧才能取得成功。以下是一些恋爱的小技巧,希望对大家有所帮助。 1. 倾听对方 在恋爱中,倾听对方是非常重要的。当你和…
-
神器来了!使用ChatGPT,轻松制作清晰的思维导图!
大家好,我是 AI 研习者轻寒。今天我要带领大家一起来看一看如何利用 ChatGPT 制作思维导图的方法。 什么是思维导图 思维导图是一种常用的视觉化工具,通过图文结合的方式,以树…
-
放生有什么忌讳吗不要让“行善”变成“作恶”,放生之前要三思啊!
将外来物种在本地环境放生,无论是有意识的恶意破坏生态食物链,还是因为无知,都应受到法律的严惩,人嘛,无论是男是女、年长或是年幼,总该要为自己的行为负责。 不知道为什么?是因为大家的…
-
国家推行火葬的隐因,国家为啥提倡火葬?
中国的传统文化历史悠久,五千多年来各种各样的文化传承影响着我们,而其中的丧葬文化也是我们古老文化传承的重要部分。目前,虽然人类的科技发展进步巨大,然而还是没有人能够逃脱死亡,最多只…
